УЗК рельсового пути: Колеса или лыжи? Что же выбрать?
(Способы ввода ультразвука при сплошном контроле рельсов –
преимущества и недостатки)
Введение
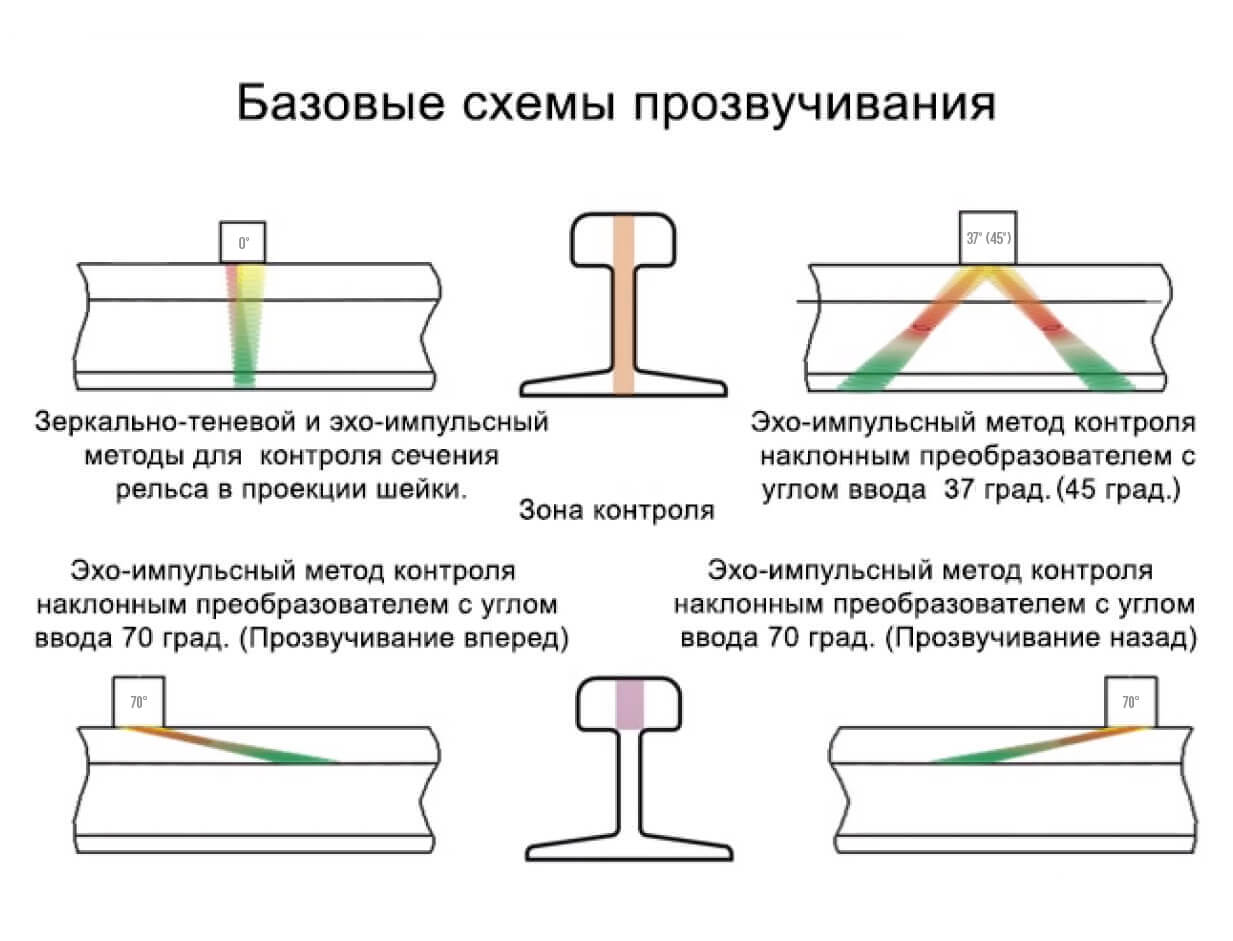
На сегодняшний день на рынках Европы, Америки, Австралии и других стран представлены десятки средств сплошного контроля рельсового пути – ручные однониточные и двухниточные тележки, локомобили и вагоны-дефектоскопы. Практически во всех них используют традиционные схемы прозвучивания, позволяющие проконтролировать головку и центральное сечение рельса:
0° – для поиска горизонтальных расслоений по всей высоте рельса и анализа акустического контакта (по уровню донного сигнала).
70° – для обнаружения поперечных трещин в головке рельса, применяются преобразователи, направленные по и против хода движения. В некоторых вариантах искательных систем, для контроля всей ширины головки рельса используют три пьезопластины (раздельно или в едином корпусе).
35° (37°, 45°) – для прозучивания шейки и подошвы рельса, преобразователи направлены также по и против хода движения.
Для обнаружения вертикальных трещин в боковых частях головки рельса применяется схема прозвучивания «Side Looking» с углом ввода 40°/55°.
Виды искательных систем
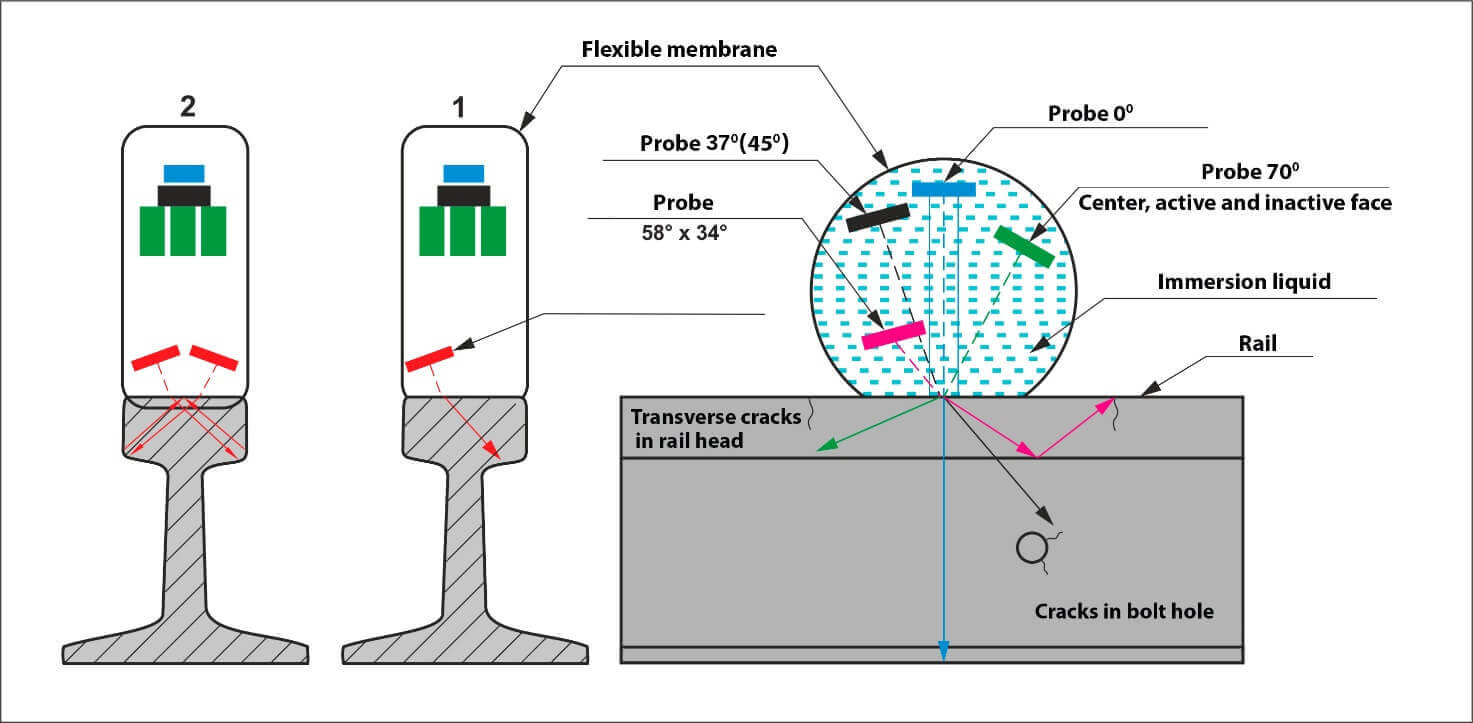
Размещение ультразвуковых преобразователей и ввод ультразвуковых колебаний осуществляют в основном двумя способами: «ультразвуковое колесо» (wheel probe, см. Рисунок 1) системы скольжения («лыжи»), которые широко используются в Восточной Европе (см. Рисунок 2);
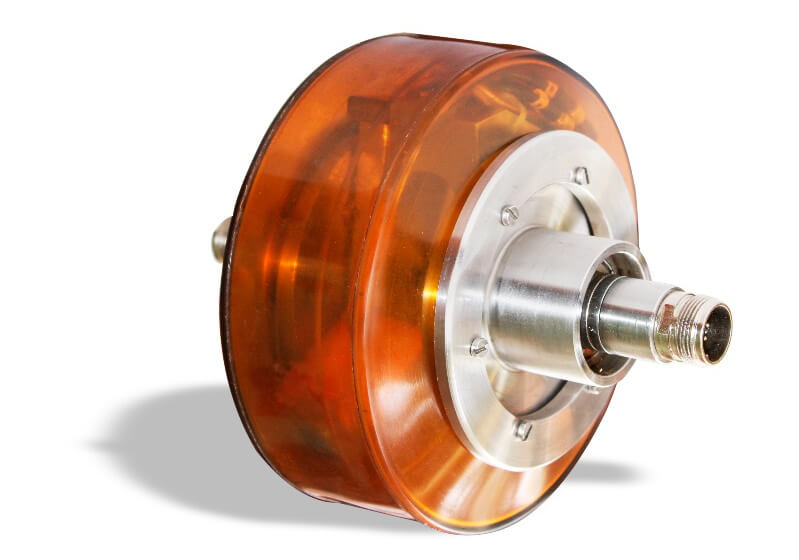
Рисунок 1 – Ультразвуковая колесная искательная система

Рисунок 2 – Акустические блоки скользящей искательной системы
Достоинства и недостатки систем ввода ультразвука
Система скольжения
Для систем скольжения, которые используются на скоростных средствах контроля в первую очередь необходимо обеспечить стабильный акустический контакт, это обеспечивается как системой автоматического отслеживания поверхности рельса (механическая часть), так и системой предварительного смачивания рельса, и системой подвода контактной жидкости непосредственно к преобразователям. Для смачивания и очистки рельса используют водяную струю под высоким давлением (до 100 бар).
Контактную жидкость под преобразователи (акустические блоки) также подают под определенным давлением. В некоторых средствах контроля контактирующую жидкость подают в распыленном виде, это позволяет экономить ее и повышает стабильность акустического контакта.
Таким образом, для обеспечения стабильного акустического контакта скользящая система требует большой расход жидкости (воды), что является одним из ее недостатков.
Второй недостаток скользящей системы, это непосредственный контакт акустических блоков с поверхностью катания рельса, вследствие чего происходит достаточно быстрый износ блоков датчиков. Для того чтобы избежать стирания преобразователей, применяют так называемые защитные башмаки. Защитные башмаки обычно выполнены из оргстекла или твердого полиуретана, и являются расходными материалами.
Колесная искательная система
Колесная искательная система представляет собой колесо с полиуретановой оболочкой, внутри которых размещены ультразвуковые ПЭП. Колесо заполнено иммерсионной жидкостью (обычно используют этиленгликоль). Колесная искательная система с схематическим расположением ПЭП показана на Рисунке 3.
Одно из самых основных преимуществ колесной искательной системы – это упругая оболочка, которая плотно прилегает к поверхности катания рельса, даже при износе головки рельса. Также с помощью изменения давления в ультразвуковом колесе, можно регулировать размер контактного пятна. Это позволяет обеспечивать более стабильный акустический контакт, что дает возможность проводить ультразвуковой контроль на скоростях до 40 км/ч. Еще одно преимущество колесной искательной системы, это значительно меньший расход контактной жидкости по сравнению скользящей искательной системой, благодаря использованию полиуретановой оболочки (tire).
Естественно, в колесной искательной системе кроме достоинств имеются и недостатки. Один из самых существенных недостатков – требуется точная настройка положения колеса относительно поверхности рельса во всех плоскостях. Изменение ориентации в любой плоскости на 10 может привести к изменению угла ввода ультразвуковых колебаний в металле (в соответствующей плоскости) на 40 и к нарушению схемы прозвучивания. Результатом будет пропуск даже довольно крупных дефектов. Поэтому, использование колесного датчика в однониточных дефектоскопах не рекомендуется. Некоторые производители обходят это ограничение, устанавливая стабилизирующую штангу с колесом, опирающимся на второй рельс, но это значительно снижает удобство пользование такой тележкой.

Еще одним недостатком колесной искательной системы по сравнению с скользящей системой, является то, что с помощью колесной искательной системы невозможно реализовать некоторые схемы прозвучивания, которые требуют фиксированного расстояния между ПЭП (например, схема «Тандем»). Это связано с геометрией ультразвуковых колес и невозможности расположить их на требуемом расстоянии относительно друг друга. Этот недостаток приводит к ухудшению выявления плоскостных дефектов в головке, не выходящих на поверхность рельса
И наконец, недостаток связанный с ограничением скорости контроля, который вытекает из принципов иммерсионного метода контроля. В колесной системе прохождение ультразвуковых колебаний от пьезопластины до бандажа колеса требуется время, сравнимое или даже большее, чем время прохождения колебаний в теле рельса. В результате, полное время пробега (time of flight) ультразвука от излучателя через иммерсионную жидкость, к донной поверхности рельса и обратно в приемник как минимум в два раза больше, чем в скользящей системе. В свою очередь, это накладывает ограничения на частоту посылок зондирующих импульсов и соответственно на скорость контроля при которой будут уверенно выявляться необходимые дефекты. На скоростных средствах контроля, которые используют ультразвуковые колесные системы обычно шаг прозвучивания составляет 4 мм. При этом скорость контроля может достигать до 40 км\ч.
В скользящей искательной системе ультразвуковые колебания вводятся непосредственно в объект контроля и соответственно можно повышать частоту зондирующих импульсов как минимум в два раза, что в свою очередь приводит к повышению или скорости сканирования, или к уменьшению шага прозвучивания, например, при той же скорости сканирования 40 км/ч, шаг прозвучивания при использовании скользящей искательной системы будет составлять 2 мм.
Выводы
Каждая с описанных искательных систем может использоваться для сплошного контроля рельсового пути, каждая система имеет свои достоинства и недостатки. Поэтому выбор типа искательных систем в большей степени связано с традициями той или иной компании, занимающейся контролем рельсового пути. Поэтому ОКОndt GROUP производит и постоянно совершенствует оба вида искательных систем, как скользящую, так и колесную.